Данная статья посвящена истории автоматических и роботоподобных устройств, создававшихся задолго до появления современных технологий и электроники.
По историческим данным, первые прототипы роботов появились ещё в III веке до нашей эры. Разумеется, в то время понятие «робот» не существовало, однако люди уже стремились создавать механизмы, способные выполнять простейшие функции без вмешательства человека. Впоследствии были созданы деревянные автоматоны, механические помощницы, устройства с элементами вычислений и даже имитации живых существ. В этой статье рассматриваются наиболее интересные примеры таких механизмов, созданных в разные эпохи и культурах.
Безусловно, приведённые в тексте устройства можно называть роботами лишь с определёнными оговорками. Тем не менее, именно они заложили основу для дальнейшего развития автоматики и робототехники, и заслуживают того, чтобы о них помнили.
Античность

Согласно ряду источников, в районе III века до н.э. вблизи Александрийского маяка были установлены автоматические фигуры, внешне напоминавшие женщин. Эти конструкции выполняли полезные функции: одни с помощью механических стрелок отображали силу ветра и волн, другие указывали направление ветра или следовали руками за движением светил. Некоторые из них были связаны с водяными часами — клепсидрами. Фигуры оживали в определённые промежутки времени, поворачивались и били в колокол, предупреждая моряков о приближении к скалам. Ночью такие устройства издавали громкие сигналы и освещались искусственным светом.

Одним из наиболее известных древнегреческих автоматов считается антикитерский механизм, обнаруженный в 1901 году на затонувшем судне. Это устройство, датируемое II веком до н.э., представляет собой сложную систему шестерёнок, по сути являясь аналоговым вычислительным прибором. Он включал в себя календарь, отображение фаз Луны, предсказание затмений и модель Солнечной системы. Несмотря на отсутствие электронной начинки, механизм способен был выполнять вычисления и отображать астрономические циклы, что делает его прототипом будущих астрономических компьютеров. Подробнее о нём можно прочитать здесь.

Ещё одним примечательным изобретением стал механический «голубь» Архита Тарентского — древнегреческого математика и инженера. Это устройство, появившееся приблизительно в 350 году до н.э., представляло собой деревянную конструкцию цилиндрической формы, напоминающую птицу. Внутри находилась полость, соединённая с котлом, в котором нагревался воздух. Под действием давления механизм приводился в движение, и автомат мог взлетать, преодолевая значительные расстояния. По сути, это был один из первых в истории летающих аппаратов с реактивной тягой.

В ту же эпоху Филон Византийский разработал механическую служанку, предназначенную для подачи вина. Устройство, выполненное в человеческий рост, удерживало сосуд в одной руке. Когда в другую помещалась чаша, система начинала перекачивать жидкость с помощью скрытых труб и клапанов. Этот автоматон стал примером раннего применения принципов гидравлики в быту и развлечениях.

Значительный вклад в развитие автоматических механизмов внёс и Герон Александрийский, живший в I веке н.э. Одним из его известных изобретений стал автомат для продажи святой воды. Устройство приводилось в действие при помощи монеты: под её весом срабатывал рычаг, открывая клапан, через который лилась вода. Это изобретение можно считать прототипом современных торговых автоматов.
Средневековье и раннее Новое время
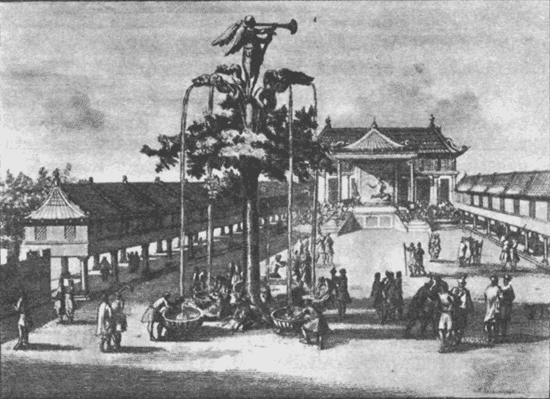
В исламском мире Средневековья, особенно в эпоху расцвета Багдадского халифата, особое место занимали автоматические устройства, которые нередко воспринимались как проявления технического чуда. Многие из них упоминались в путевых заметках, летописях и хрониках, хотя сами оригинальные механизмы до нас не дошли. Так, по сообщению византийских послов, посетивших Багдад в 917 году, во дворце находилось удивительное «серебряное дерево». Оно стояло посреди водного резервуара и имело 18 ветвей, на которых размещались миниатюрные птицы из золота и серебра, каждая из которых издавала звуки. Интересно, что в других источниках аналогичное дерево приписывается резиденции хана Мункэ в столице Монгольской империи — Каракоруме, а его автором называли некоего француза по имени Буше.

Одним из наиболее известных инженеров исламского мира стал Иса ибн Исмаил аль-Джазари (1136–1206), автор обширного трактата «Книга знаний о гениальных механических устройствах», в котором он описал более 50 автоматов различной сложности. Наибольшую славу ему принесло так называемое «слоновье часы» — многоуровневая водяная конструкция, выполненная в форме большого азиатского слона. Внутри находился резервуар с водой, в котором плавала чаша с отверстием, наполнявшаяся жидкостью в течение 30 минут. Когда чаша тонула, она запускала цепочку механических событий: активировались фигуры сокола, змея и погонщика, срабатывал барабанный механизм, а стрелка циферблата передвигалась, указывая время.
Каждый элемент был частью сложной системы, включающей струны, рычаги, шкивы и балансиры. Впечатляло не только техническое исполнение, но и эстетическая проработка скульптур. Все устройство действовало до тех пор, пока в корзине оставались металлические шары — ключевые элементы для приведения механизма в движение.

Существенный вклад в развитие механики внёс и гений итальянского Возрождения — Леонардо да Винчи. В 1495 году он спроектировал автоматического «робота-рыцаря», способного выполнять базовые движения человека: садиться, ходить, поднимать руки и даже размахивать мечом. Чертежи, сохранившиеся в записях мастера, свидетельствуют о наличии сложной системы тросов, шестерёнок и кривошипов, обеспечивавших координацию движений. По некоторым версиям, механизм руки мог выполнять простые действия, вплоть до рисования.

Основой для движущихся элементов служили две независимые системы: одна управляла руками с помощью тросовых тяг и зубчатых передач, вторая обеспечивала перемещение ног посредством кривошипно-шатунного механизма. Все это помещалось в каркас, имитирующий человеческое тело, который затем должен был быть облачён в рыцарские доспехи — как отмечено в рукописях Леонардо.
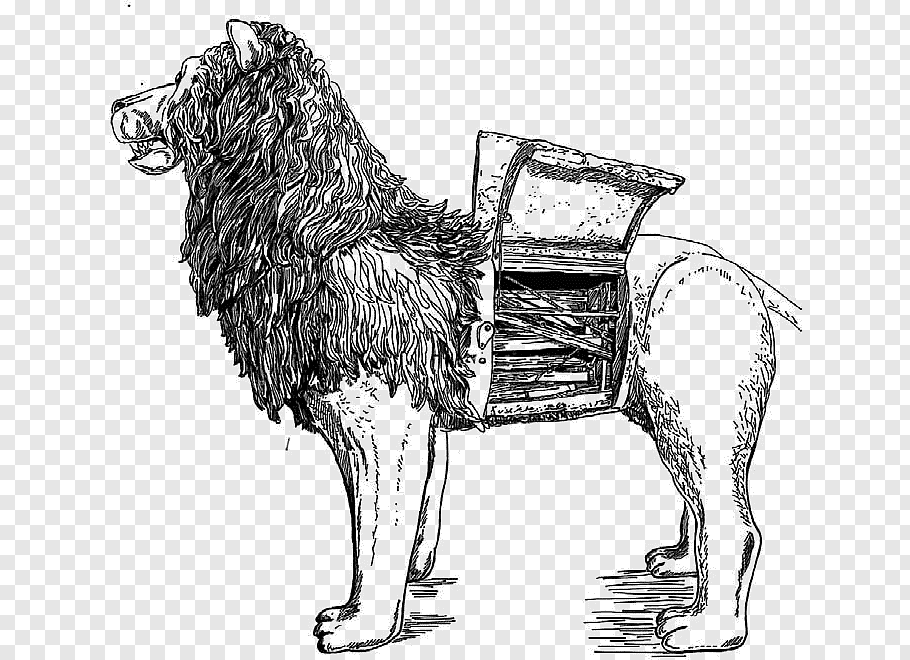
Среди других малоизвестных проектов Леонардо — механический лев, созданный в 1584 году. Согласно описаниям современников, лев входил в зал к французскому монарху, становился на задние лапы и раскрывал грудную секцию, внутри которой находился букет лилий — символ династии Валуа и города Флоренции. Полные чертежи механизма до наших дней не дошли, однако даже упоминание такого устройства свидетельствует о масштабности инженерного воображения да Винчи.

Любопытный эпизод произошёл в Англии в середине XVI века. Астролог и математик Джон Ди, известный своими экспериментами на стыке науки и мистики, якобы сконструировал механического жука из дерева. Устройство должно было летать, и по некоторым источникам оно было запущено во время театрального представления по пьесе Аристофана «Мир» в 1543 году. Зрители были настолько поражены увиденным, что заподозрили автора в колдовстве. Однако до обвинения в ереси дело не дошло, возможно, потому, что устройство оказалось слишком неуклюжим и едва ли действительно могло летать.

В средневековой Европе широкое распространение получили религиозные автоматоны — механические устройства, имитирующие священные фигуры. Особенно часто встречались фигуры Девы Марии, выполненные в натуральную величину из дерева. Такие механизмы были оснащены часовыми приводами, позволявшими фигуре поворачивать голову и совершать благословляющие жесты. Автоматоны использовались в храмах и на публичных мероприятиях, усиливая эффект религиозных обрядов с помощью движущихся изображений.

В Японии аналогичные устройства назывались «каракури нингё» — куклы-автоматоны, разработанные в эпоху Эдо (1603–1868). Одним из самых известных примеров является «Чахакоби нингё» — домашний сервировочный робот, предназначенный для подачи чая. Когда хозяин ставил чашку на поднос, устройство активировалось и направлялось к гостю. После того как чай выпивался и чашка возвращалась на поднос, робот автоматически возвращал её обратно. Интересно, что маршруты передвижения можно было задавать вручную, программируя точку разворота.
Конструкция устройства была выполнена из вишнёвого дерева, шестерёнки изготавливались из дуба и японского кедра, а соединения фиксировались без использования гвоздей. Единственная металлическая деталь — регулятор пружинного балансира — находилась в контроллере механизма. Движение обеспечивалось системой противовесов.

Примером более сложного японского автоматона служит «Юми-ири Дойи» — механический лучник, созданный мастером Танака Хисасигэ около 1840 года. Фигура высотой около 30 см могла извлекать стрелу из колчана, натягивать тетиву и метко поражать цель. Цикл включал четыре выстрела, из которых один намеренно делался с промахом для имитации реалистичного поведения. Все элементы механизма приводились в движение слаженной системой шестерёнок и пружин.

В XVIII веке в Европе также создавались механические устройства, предназначенные для развлечения и научных демонстраций. Так, французский изобретатель Жак де Вокансон в 1740-х годах разработал «механическую утку» из меди. Устройство имитировало поведение настоящей птицы: крякало, пило воду, поедало зерно, махало крыльями и «переваривало» пищу. Механизм, спрятанный в постаменте, был сложной комбинацией рычагов, цилиндров и трубок.

Одним из наиболее выдающихся достижений в истории автоматонов стали механизмы, созданные швейцарским мастером Пьером Жаке-Дрозом и его сыновьями в 1770-х годах. Комплекс включал трёх человекоподобных роботов: Писателя, Художника и Музыканта. «Писатель» использовал перо, обмакивал его в чернильницу, стряхивал излишки и каллиграфически писал запрограммированный текст — всё это при помощи 6000 миниатюрных деталей.

Презентация изобретения
«Музыкант» — женская фигура, собранная из 2500 деталей, — исполняла музыкальные фрагменты продолжительностью до 45 секунд, нажимая клавиши клавикорда собственными руками. Робот был оснащён системой, имитирующей дыхание: грудная клетка поднималась и опускалась, глаза следили за движением пальцев, а по завершении композиции фигура кланялась. Инструмент, специально изготовленный для автоматона, включал 24 трубы, и его звук не был механической имитацией — кукла действительно играла музыку в реальном времени.
Ещё


Роботы после 19-го века

В 1805 году швейцарский мастер Анри Мелларде сконструировал автоматон, способный писать стихи на французском и английском языках. Это устройство стало одной из первых попыток механизировать творчество. Более чем через столетие, в 1928 году, Институт Франклина в Филадельфии приобрёл загадочную машину, хотя сотрудники сомневались в её подлинности. Однако, когда автоматон удалось привести в рабочее состояние, он вывел фразу: «Написано автоматоном Мелларде». Все сомнения сразу рассеялись.

В 1810 году немецкий изобретатель Фридрих Кауфманн, специализировавшийся на создании музыкальных инструментов, разработал механического трубача. Устройство приводилось в действие с помощью шагового двигателя и программного барабана, запускаемого ручкой. Фигура автомата изображала мужчину ростом около 180 см в испанском костюме. Сложный механизм состоял из двух медных ступенчатых барабанов с насечками, шести ударных штифтов и четырёх рычагов. Они активировали ветровые клапаны, через которые воздух направлялся на 12 штифтов, создавая звуки трубы.
Дополнительные изображения


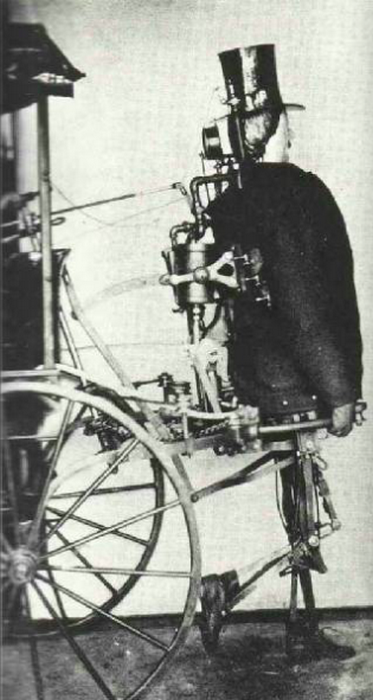
В 1869 году в США инженеры Цадок Дедерик и Исаак Граас представили парового автомата, который мог тянуть повозку. Аппарат представлял собой фигуру человека высотой около двух метров и весом 226 кг, за что получил прозвище «Дэниел Ламберт» — в честь знаменитого англичанина, известного своей полнотой. Внутри располагались бойлер и топка, а энергия от парового двигателя через шток на спине передавалась ногам. Фигура крепилась к карете двумя металлическими штангами и могла делать четыре шага за один оборот двигателя. Одна загрузка топлива обеспечивала движение на протяжении двух-трёх часов.

В 1928 году американский инженер Рой Уэнсли представил миру робота по имени «Мистер Телевокс». Он мог выполнять простейшие команды голосом — точнее, свистом. На демонстрации робот реагировал на определённые звуковые сигналы: включал свет, запускал вентилятор и пылесос, открывал окна и закрывал двери. При этом сам аппарат не передвигался — по сути, он представлял собой автоматическую телефонную станцию, к которой были подключены электроприводы, управляющие бытовыми приборами. Микрофон улавливал звуки, которые проходили через усилители и фильтры, реагирующие на определённые частоты — до, ми, соль, — что позволяло задавать команды.

В 1936 году на Всемирной выставке в Париже был представлен первый советский человекоподобный робот «В2М», созданный 16-летним школьником Вадимом Мацкевичем. Устройство имело рост 1,2 метра и управлялось с помощью радиосигналов. Робот мог выполнять восемь различных команд, среди которых были движения рук, ног и головы — на тот момент это стало настоящей сенсацией.


Робот Электро был разработан в 1939 году компанией Westinghouse Electric Corporation и представлен на Всемирной выставке в Нью-Йорке как пример достижений в области автоматики и электротехники. Устройство было спроектировано для демонстрации технического прогресса и инженерных возможностей компании.
Электро мог выполнять базовые действия, включая ходьбу, вращение головы, движение губами и пальцами, а также махание руками. Благодаря встроенному голосовому модулю, робот обладал словарным запасом из примерно 700 слов, что позволяло ему участвовать в ограниченном диалоге. Кроме того, с помощью фотоэлектрических сенсоров он мог различать цвета, в частности красный и зелёный. Среди демонстрируемых способностей также были надувание воздушных шаров и воспроизведение процесса курения сигарет, которое требовало участия человека.

В 1940 году для Электро была создана механическая собака по имени Спарки, которая сопровождала робота на выставках. Это дополнение было призвано усилить привлекательность демонстрации и подчеркнуть достижения в области робототехники. В последующие десятилетия Электро появлялся в различных медиа, в том числе в 1960-х годах в одном из художественных фильмов.
Робот Электро был далеко не единственным механическим устройством того времени. Одновременно развивались и другие направления — создание зооморфных и орнитоморфных автоматонов, имитирующих поведение животных и птиц. Некоторые из них представляли собой настоящие достижения инженерной мысли, тогда как другие были, по сути, театральными механизмами, управляемыми вручную и предназначенными для развлечения публики.